

By Caleb Sooknanan ’20
Biosensors have become increasingly practical within the medical field, as they can detect different biometrics such as heart rate and body temperature levels. However, current biosensors can wear out quickly and elicit health problems such as trauma. Many efforts — especially in the area of capsule robotics — have been made to develop biosensors that are noninvasive and effective at monitoring conditions over time. Doctor Benjamin S. Terry and researchers from the University of Nebraska proposed a novel method for delivering and implanting a biosensor into the human body using an implantation capsule robot (ICR). The device would be attached to the small intestine’s inner lining to understand how the gastrointestinal tract (GI) could be used for future biosensor technology. The researchers analyzed the GI because of its large volume and surface area, as well as its closeness to vital organs in the body.
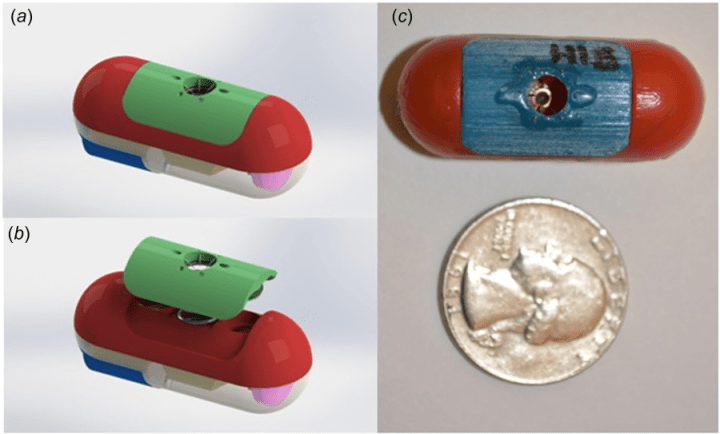
The researchers designed the ICR to undergo a certain sequence of events: the ICR is swallowed and arrives at a location within the digestive tract, the ICR deploys the sensor to the GI wall via a tissue attachment mechanism (TAM), and the ICR separates from the sensor and exits the body in a typical manner, allowing the sensor to act inside the body. To ensure that their device fulfilled these tasks, the researchers designed the ICR with three functional components. A TAM would be connected to the ICR using vacuum pressure, while an ejection mechanism would deploy the TAM to the GI, and a capsule body with batteries and circuits would be designated as a deployment control unit. The different components were organized so that they were in equilibrium while the ICR was in a resting state, and once the tissue capturing sequence was activated, energy would be released to attach the sensor to the intestinal walls. The researchers included a compartment for reusable batteries and a vacuum valve that could be reset externally. The researchers conducted tests to determine how frequently a ICR could attach a TAM to the intestinal wall and ensure that the ICR separated from the TAM after tissue attachment.
Using X-ray images, the researchers showed that the TAM successfully separated from the corresponding ICR. This separation, the researchers reasoned, may have resulted from the ICR’s exposure to cyclic peristaltic waves. Possible limitations may have included how separation by pulling the ICR from the TAM may weaken TAM attachment strength and duration, thereby harming the implantation process. Hence, more research is needed to develop an ICR that incorporates long-term and short-term attachment depending on the situation.
References:
- B. Terry, et al., Design and Validation of a Biosensor Implantation Capsule Robot. Journal of Biomechanical Engineering 139, (2017). doi: 10.1115/1.4036607
Image retrieved from: http://biomechanical.asmedigitalcollection.asme.org/data/journals/jbendy/936304/bio_139_08_081003_f002.png

{kind=link}